






河北北重机械生产的工业机器人行走机构驱动部分的工作指示灯是正常的,但工作角度有时大,有时小。原因:机床拖板长期高速运转,在长期使用过程中,刀架的重复定位精度出现偏差。
拖板每次都能回到加工起点,但工件尺寸仍有变化。原因:通常是由心轴引起的。主轴的高速滚动会导致轴承的严重磨损,从而导致加工标准的变化。
以上两种工业机器人行走机构故障的解决方法:用百分表抵住刀架底部,同时通过系统修改一个固定循环程序,检查拖板的重复定位精度,调整丝杆间隙,更换轴承。用千分表检查刀架的重复定位精度,调整机床或更换刀架。
旋转标尺的维护:工业机器人行走机构存在旋转标尺,表面光洁度差。
故障原因:可能是刀尖损坏,不锋利,也可能是工业机器人行走机构发生共振,放置不平稳,导致加工过程中出现轻微偏差。
解决办法:取下刀具磨损或损坏的不锋利的部分,然后选择更好的刀具,重新设置。当发生共振或放置不稳定时,需要稳定地调整和固定水平。
原文链接:http://www.knots.cn/chanpin/show-161853.html,转载和复制请保留此链接。
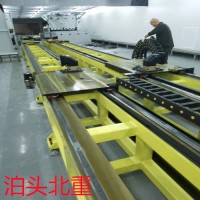
以上就是关于机器人行走轨道 工业机器人行走地轨 机器人行走轨道安装 河北北重机械铸造加工全部的内容,关注我们,带您了解更多相关内容。
以上就是关于机器人行走轨道 工业机器人行走地轨 机器人行走轨道安装 河北北重机械铸造加工全部的内容,关注我们,带您了解更多相关内容。